-
- 20160809琴似工業_01飛行制御
-
- 20160809琴似工業_02パラフォイル設計図の自動作成
-
- 20160809琴似工業_03仮機体の制作
琴似工業高校
ミッション
パラフォイルによる飛行制御
最終的には「パラフォイルを飛行制御をして目的の場所に飛ばすこと」を目標としています。
今回はその途中段階として「飛行制御がきちんと出来ているか」を検証します。
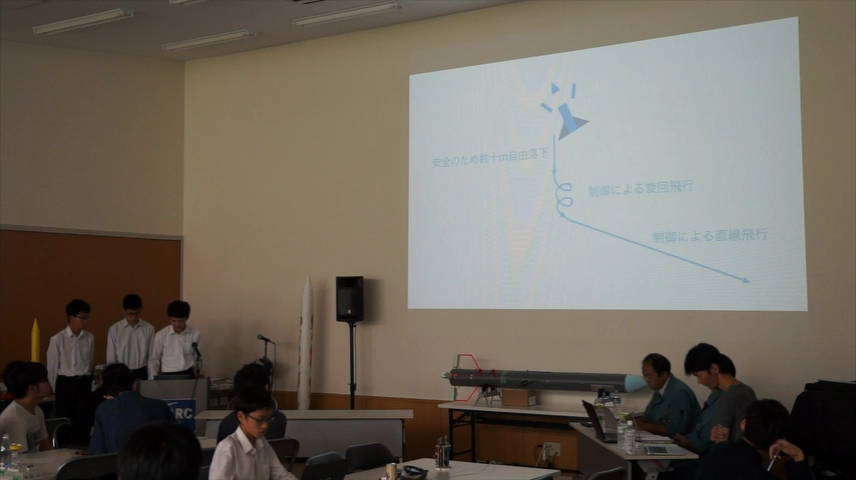
制御の流れ
- (ロケットからの解放後)安全のため数十メートル自由落下します。パラフォイルが飛びすぎて敷地外に出てしまうことを防止します。
- キャリアが開き機体が外に出てから制御を開始し、最初は「旋回制御」を行います。一定時間後、真っ直ぐ進む「直進制御」を行います。
こうすることで、きちんと制御が出来ていることが分かりやすくなると考えています。
使用予定のマイコン、センサ
- mbed
- PIC:サーボモータへのPWM出力
- 3軸加速度・3軸角速度センサ:パラフォイルの飛行制御や機体の3D表示
- 温度・気圧センサ:機体の高度計算
- 無線モジュール:機体の各種データを地上に送信
- GPS:機体の位置を知る
- サーボモーター:パラフォイルのブレークコードを引っ張る
- フライトピン:キャリアから機体が放出されたタイミングを検出
- SDカード:データの記録
スペースプローブコンテスト本線までの目標と課題
- センサの検証実験
- キャリアの軽量化
- パラフォイルの飛行、展開の実験
- データのリアルタイムのグラフ表示
- 機体の3D表示
センサの検証実験
これまではセンサ、無線モジュール、マイコンはきちんと動作するかが、本番にならないとわからなかった。
今回は本番に近い検証を行うため、50m程度上昇する水ロケットを用いて、センサーボードの検証を行う。
検証を行うことで本線でのデータの信頼性向上、取得の成功率を高める。
また、水ロケットは容易に製作でき、法律の規制が少ないという利点がある。
キャリアの軽量化
前回は、扉のように開く仕組みでパラフォイルをうまく展開させるために非常重くなってしまい、機体やパラフォイルに割り当てる重量が少なくなるという弱点があった。
これを解決するため、今回はより軽く斬新なアイディアのキャリアを作成する。
パラフォイルの飛行、展開実験
現時点で機体の重さが確定していないので、あらゆる重さに対応できるように400g,500g,600gのパラフォイルを設計/作成し、飛行/展開実験を行い性能の良い気体を制作する。
データのリアルタイムグラフ表示
無線モジュールで受信したデータを、自作アプリケーションでリアルタイムにグラフ表示する。
前回までは、無線で受信したデータはTeraTermで数値として表示し変化が分かりづらかったので、リアルタイムにグラフ表示し、数値の変化を視覚的にわかり易く表示する。
機体の姿勢の3D表示
現在の機体の状態を3Dで表示するアプリを開発している。
機体の姿勢を3軸加速度センサ、3軸ジャイロセンサで取得した値から姿勢を計算し、PCに無線で姿勢を送信し表示する。これができれば空中の機体の姿勢をリアルタイムに確認することが出来る。
現在の進捗状況
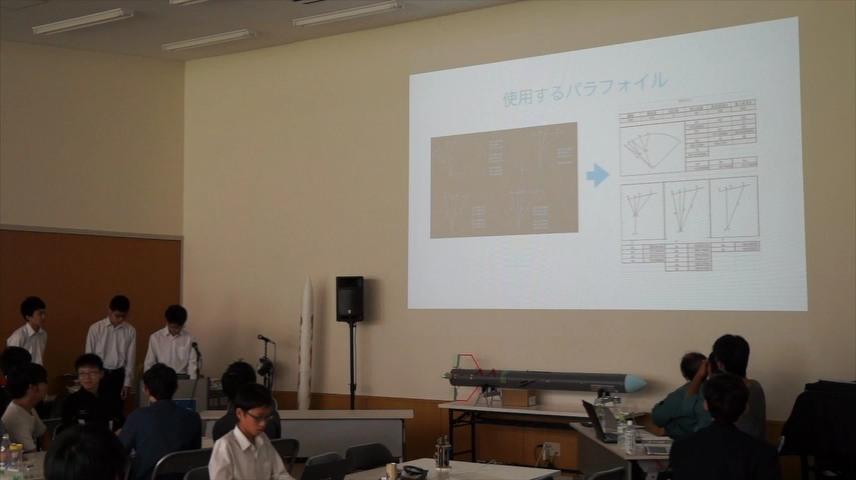
パラフォイルの重心位置、迎え角の決定
これまでパラフォイルはCADを用い手動で設計図を作成していたが、今回からExcelでマクロを使用し自動的に書き出すようにし、効率的にたくさんの設計が出来るようになった。
この仕組を使って、たくさんのパラフォイルを作成/実験を繰り返し、パラフォイルの重心位置31.5%、迎え角2~4度が安定して飛行することが分かった。
飛行制御機構の改善
前回までは、ブレークコードを引く部品がV字型のため、引けるコードの長さが短くなり、制御が難しくなってしまった。
今回は、コードを長く引けるようにすることで、制御の効きが悪かったのを改善した。
今後はこの機構を使って制御の実験を行う。
リアルタイムのグラフ表示と3D表示
VisualBasicとC++で作成し完成したものはあるが、両方のアプリを同時に実行出来なかったり、応答速度が遅かったり、と実用性に欠ける。
そこで現在は開発環境をProcessingに変更し、リアルタイムグラフと3D表示の両方を同時にかつ高速に処理できる一つのアプリケーションの開発を行っている。
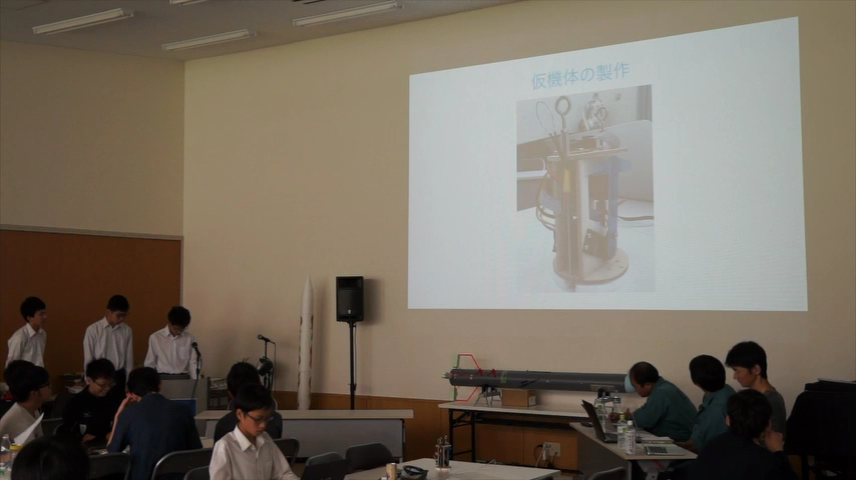
仮機体の作成
今回の技術交流会のために、本線の仕様に近い仮の機体を作成した。
今後はこの機体を検証に使用して、成果の確実性向上を図ります。
コメント、アドバイス
高橋
- パラフォイルの設計をCADで作るだけでなく、数値をパラメータ化してExcelで設計を自動化していることに驚きました。
(高橋)そういったことをすれば、設計が効率化出来るということをどうやって学ぶんでしょうか?先輩からアドバイスを受けるとか、授業でそうゆうことをやったりるととか、それとも自分たちの工夫なのですか?
(琴似工業)先輩からです。
(高橋)技術が継承されているということですね。
- プログラミングに関してリアルタイムのアニメーション表示をProcessingでやったり、ちゃんとモダンなやり方でやるんだな、と驚きました。ぜひ動いているところを見たいです。楽しみにしています。
大塚
今の時点(8/9、本戦は10/1)で、仮の機体が完成しているのが良いと思います。
制作には時間が掛かるので直前に完成、というのがよくあります。ただ完成度が低くても一通り作って動かしてみると、得られることはすごく多いんです。なので一部出来ていないものがあるから全体を組み立てないのではなく、条件付きでも全体を組んで動かしてみる、という進め方がよいと思います。
ただ、あまりに完成度の低いもの同士を組み合わせると、どこで不具合が起きているかが分かりづらくなります(特にソフトウェア)。
ですので、ある程度個別に完成度を高めてから結合する事は必要です。
植松
- パラグライダーで飛行制御するときは紐(ブレークコード)を引っ張るんだけど、(パラフォイルの)横幅が長い時は、引っ張る量が少なくても大きな変位になります。でも細長くない場合は、紐を引く量をかなり大きくしないと旋回が思うようにできなくなくなります。
なので、今回、紐を引く量を増やしたというのは良い改善だと思います。
- もう一つの(制御方法の)考え方として、「ハンググライダーは紐を引かない」んです。
ハングライダーは人間が横棒の上を左右に移動します。「人間=重心そのものを左右に動かす」ことで制御しています。もしかすると横幅の短いパラフォイルも、真ん中に並行部分があって、その上をスペースプローブ本体が左右に移動すると重心が制御しやすいかもしれません。
- わりと色んな人が「最初から100点を求めようとして、結局手が出ずに終わってしまう」人が多いなか、今回のようなトライアルの機体を作ってみるというのは非常に重要な事だと思います。
(サバイバルゲームなどの)鉄砲も箱から出していきなり当たるものなんて無いです。的の真ん中に照準を合わせ、3,4発撃ってみると、絶対ど真ん中ではない部分に当たります。そのずれを照準器を調整して、やっと当たるようになります。なので、最初に一発撃ってみる=形にしてみる、というのが重要です。
他の学校の皆さんも、まずは「形にしてみる」というのがすごく重要だと思います。そこから1つづつ前に進んで行けばいいと思います。
- 琴似工業さんは、何年も参加してくれていて、先輩からの「蓄積」があるので、すごく前に進んできている気がします。新しく参加する学校も「蓄積」さえすれば必ず良くなります。それは「自分の宝」にもなります。
その中でも「失敗の蓄積」が重要なので、失敗データも蓄積していって欲しいと思います。